Hackathon — Lloyd Assurances Partnership
Haniny – AI Driver Assistant
Developed Haniny as a real-time perception and risk-scoring system under hackathon constraints. We treated it as a systems-integration challenge: camera ingestion, model inference, event scoring, and mobile feedback had to work as one low-latency loop.
Visual Architecture


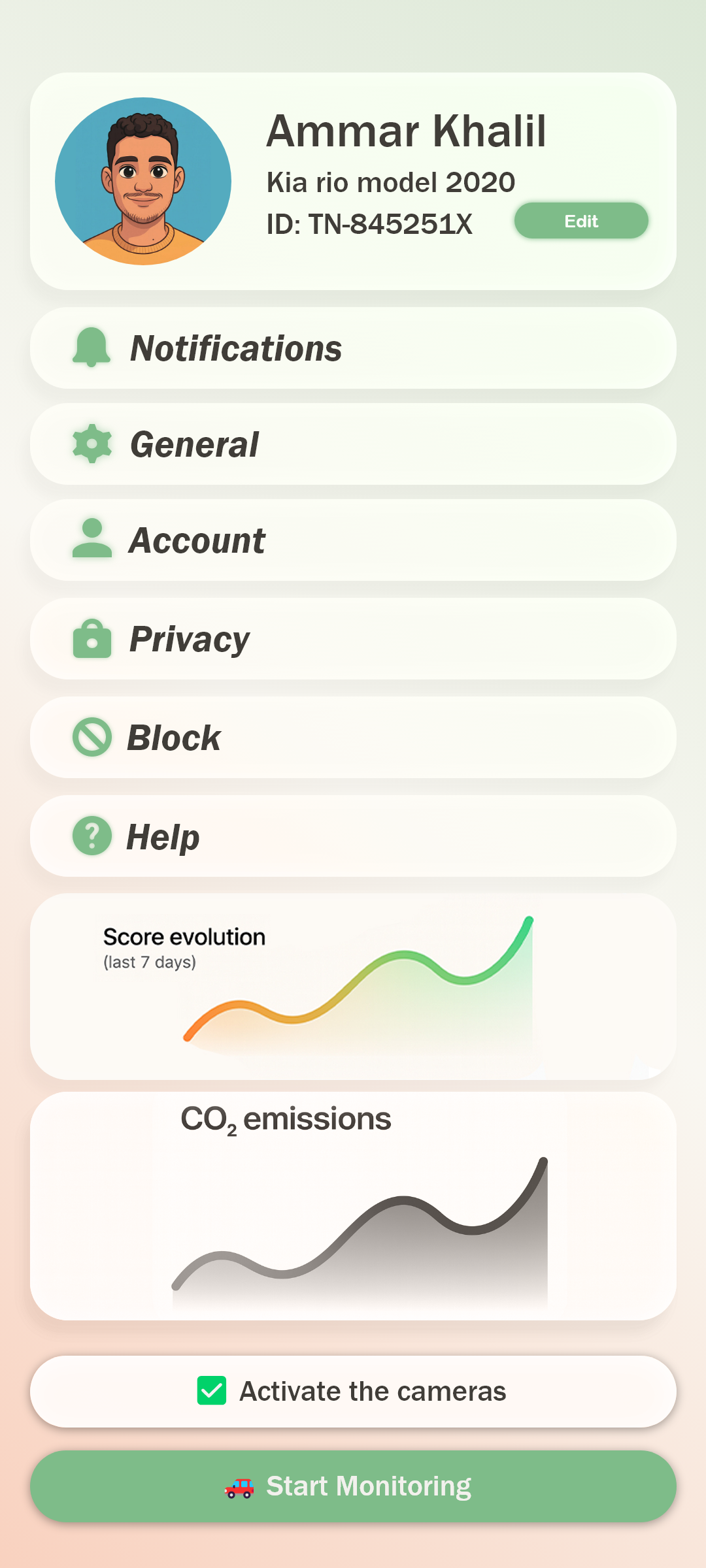
Unified telemetry and HUD overlay.
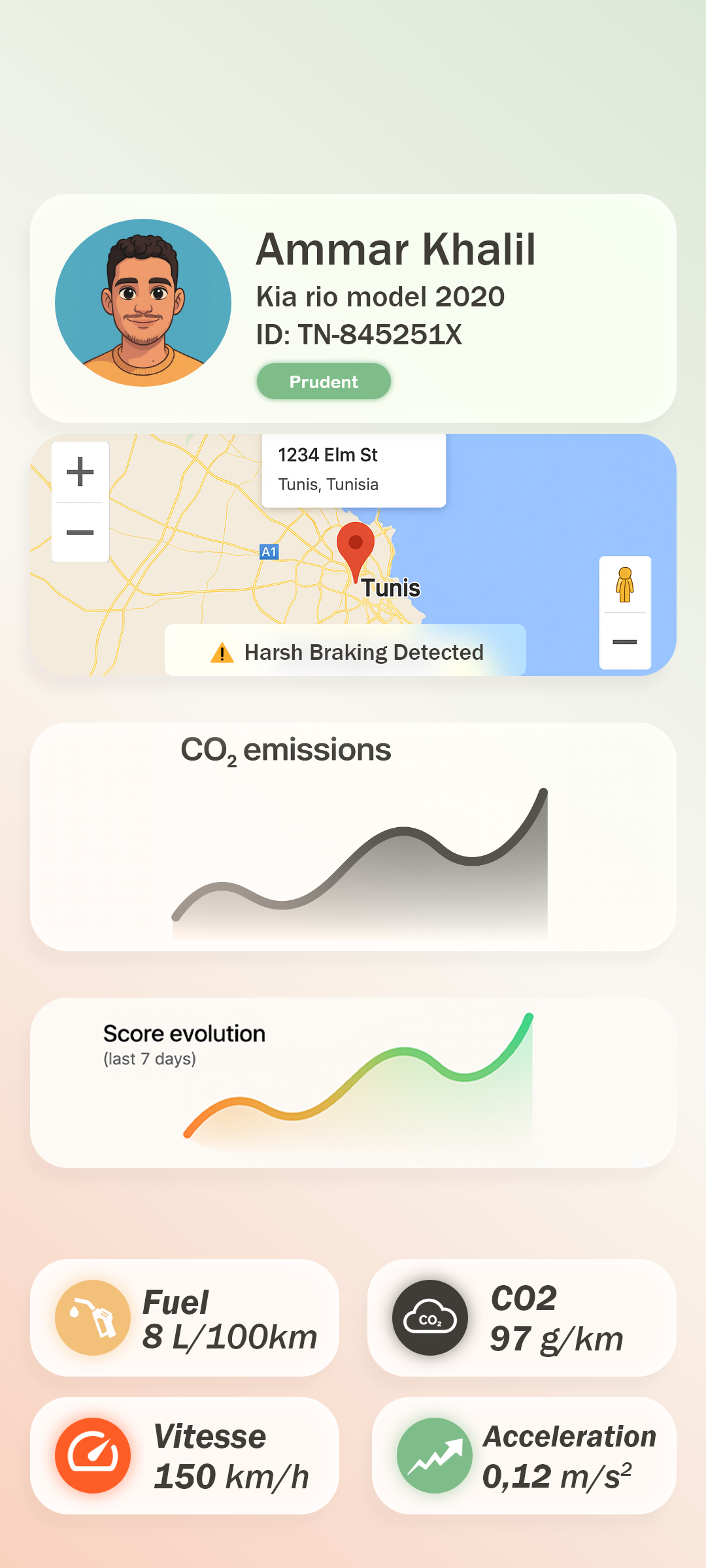
Sensor stream visualization and data analysis.
Real-time YOLOv8 and MediaPipe processing.
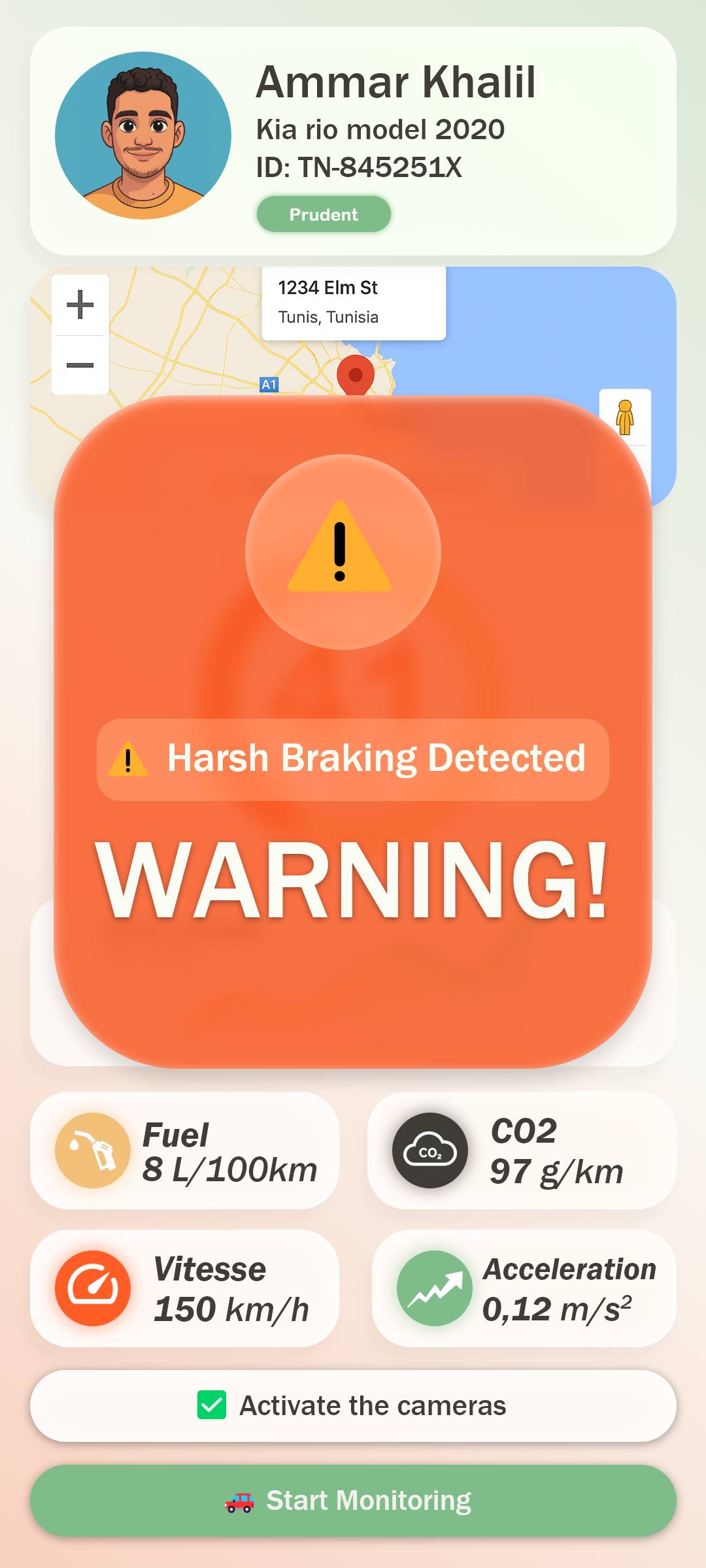
Dynamic risk scoring based on driver behavior.
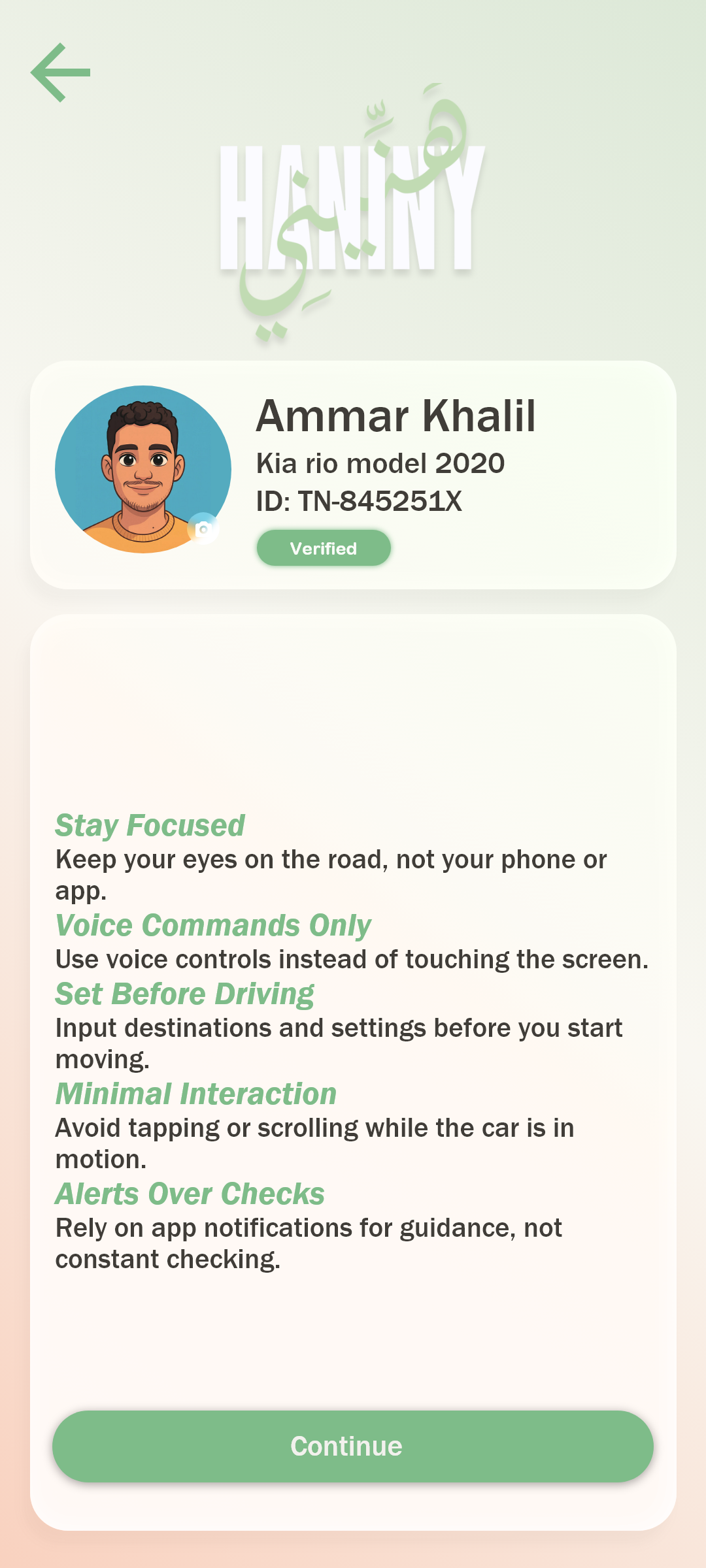
Fatigue and attentiveness tracking modules.
Official branding for Lloyd Assurances partnership.
System Architecture
Built a dual-stream processing pipeline where interior (driver) and exterior (road) camera feeds are ingested via OpenCV, processed by deep learning models, and fused in a shared event bus. Results are transmitted to a mobile frontend (Flutter) using high-frequency WebSocket messaging.
Implementation Strategy
Architecture involves integrating YOLOv8 and MediaPipe for simultaneous processing, optimizing model weights for mobile-compatible inference speeds, and building a low-latency state synchronization layer between the backend and hybrid app.
Technical Outcome
Provides a functional prototype for safety-critical driver assistance, focusing on tight model-to-product integration and multi-sensor data fusion.
System Features
Continue Exploration